科学界近日取得了一项突破性的发现,揭示了大脑在运动控制方面的全新机制。由中国科学院自动化研究所领衔的研究团队,在猕猴执行自然抓取任务的过程中,观察到了一种类似“GPS”的神经编码机制,这一机制位于大脑的运动皮层,能够实时追踪手部在空间中的位置。
这项研究不仅为理解大脑如何精确控制运动提供了新的视角,同时也为脑机接口技术和机器人运动控制的发展带来了深远的影响。相关研究成果已在国际权威学术期刊《自然・通讯》上发表。
长期以来,科学家们一直试图解开大脑如何规划和执行复杂运动任务的谜团。特别是针对手臂和手部等精细部位的运动控制,其背后的神经机制更是备受关注。此前的研究已经发现,大脑海马体中的“位置细胞”在身体导航中扮演着关键角色,但手等身体部位是否也存在类似的导航机制,则一直是个未知数。
为了解开这一谜团,研究团队在四只猕猴的大脑背侧前运动皮层(PMd)中植入了微电极阵列,详细记录了它们在执行自然抓取任务时的神经活动。同时,通过多个摄像头捕捉猕猴手部的运动轨迹,对PMd神经元的活动模式进行了深入分析。
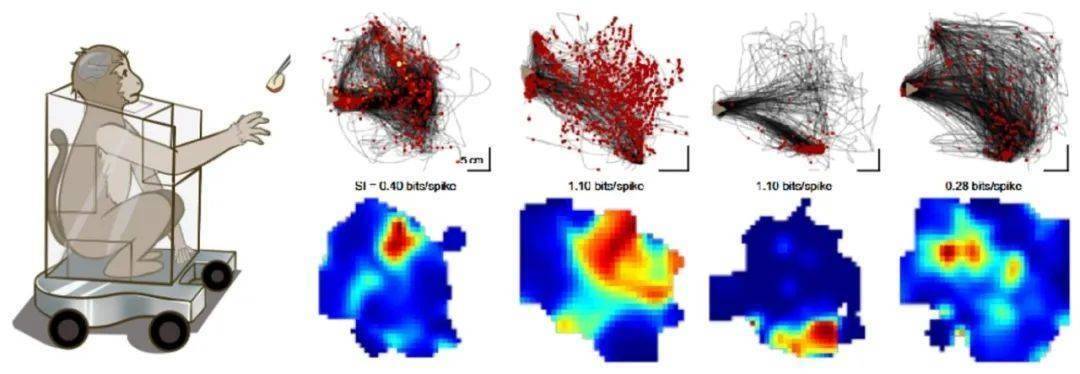
研究结果显示,约有22%的PMd神经元在猕猴手部处于特定空间位置时表现出显著的活动增强,形成了所谓的“位置野”。这些神经元能够高效、实时地编码手部的位置信息。更令人惊讶的是,仅利用50个最活跃的位置神经元(占总记录神经元的约10%),就能以高达80%的准确率解码手部运动轨迹。这一发现表明,手位置信息在PMd中以“位置野”的形式存在,与海马体中的位置细胞有着异曲同工之妙。
进一步的研究还发现,手位置信息与手的运动方向、速度以及抓取目标的位置等信息在同一个PMd神经元群体中得到了共同编码。这种混合编码方式使得大脑能够同时处理空间信息和运动信息,从而实现了高效、灵活的运动规划和执行。这一发现不仅揭示了大脑在运动控制方面的复杂机制,同时也为理解海马体在空间导航任务中的作用提供了新的线索。
这项研究成果对于脑机接口和机器人技术的发展具有重要意义。通过解码这些位置神经元的活动,未来有望开发出更加精准、高效的神经假肢控制系统。同时,基于大脑的运动导航原理,可以设计出更加灵巧、智能的机械臂控制算法,为工业自动化和医疗康复等领域带来革命性的突破。
此次研究由中国科学院自动化研究所、解放军第九医学中心、吉林大学第一医院等多家单位共同完成,展现了跨学科合作的强大力量。研究团队表示,将继续深入探索大脑在运动控制方面的奥秘,为推动神经科学和人工智能领域的发展做出更大的贡献。