人形机器人系列专题之灵巧手:仿生设计大势所趋,OptimusGen3带动
2025-02-09
今天分享的是:人形机器人系列专题之灵巧手:仿生设计大势所趋,OptimusGen3带动电机、腱绳、微型丝杠需求扩张-东方财富
报告共计:33页
《人形机器人系列专题之灵巧手:仿生设计大势所趋,Optimus Gen3带动电机、腱绳、微型丝杠需求扩张》由东方财富证券撰写。报告指出,灵巧手作为人形机器人关键部件,拟人化仿生设计是发展趋势,Optimus Gen3的升级带动了相关零部件需求增长。
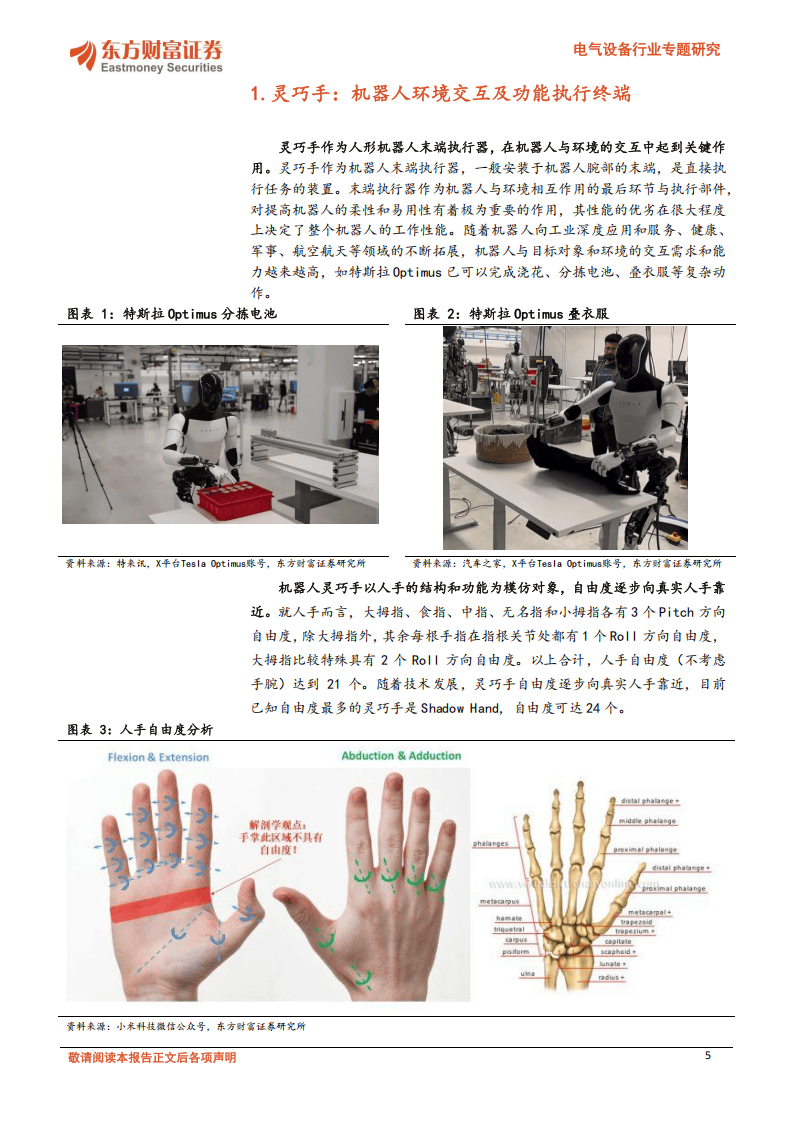
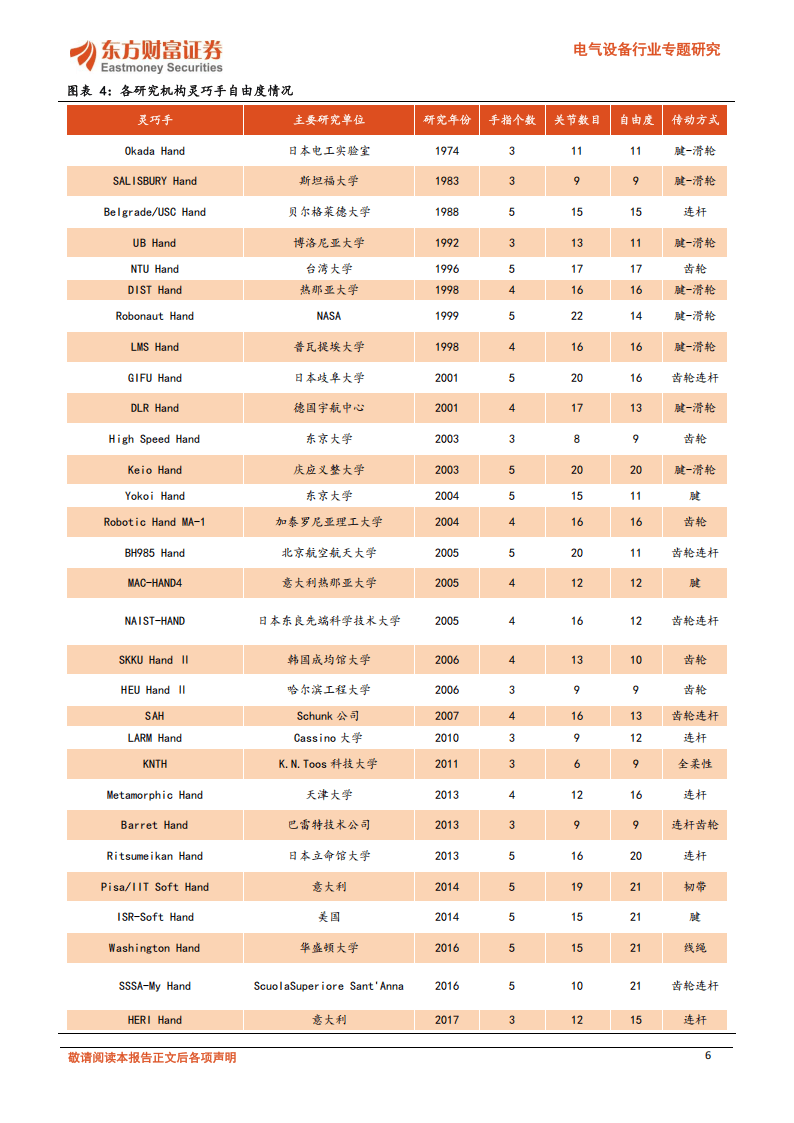
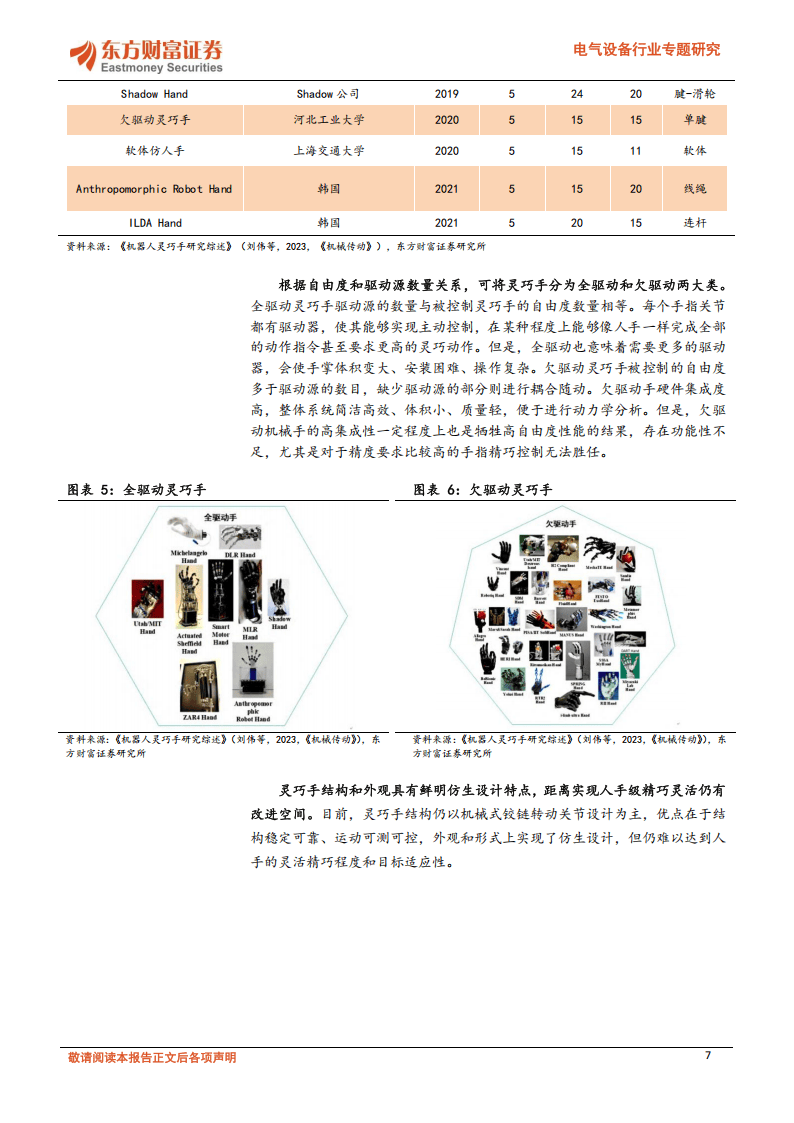
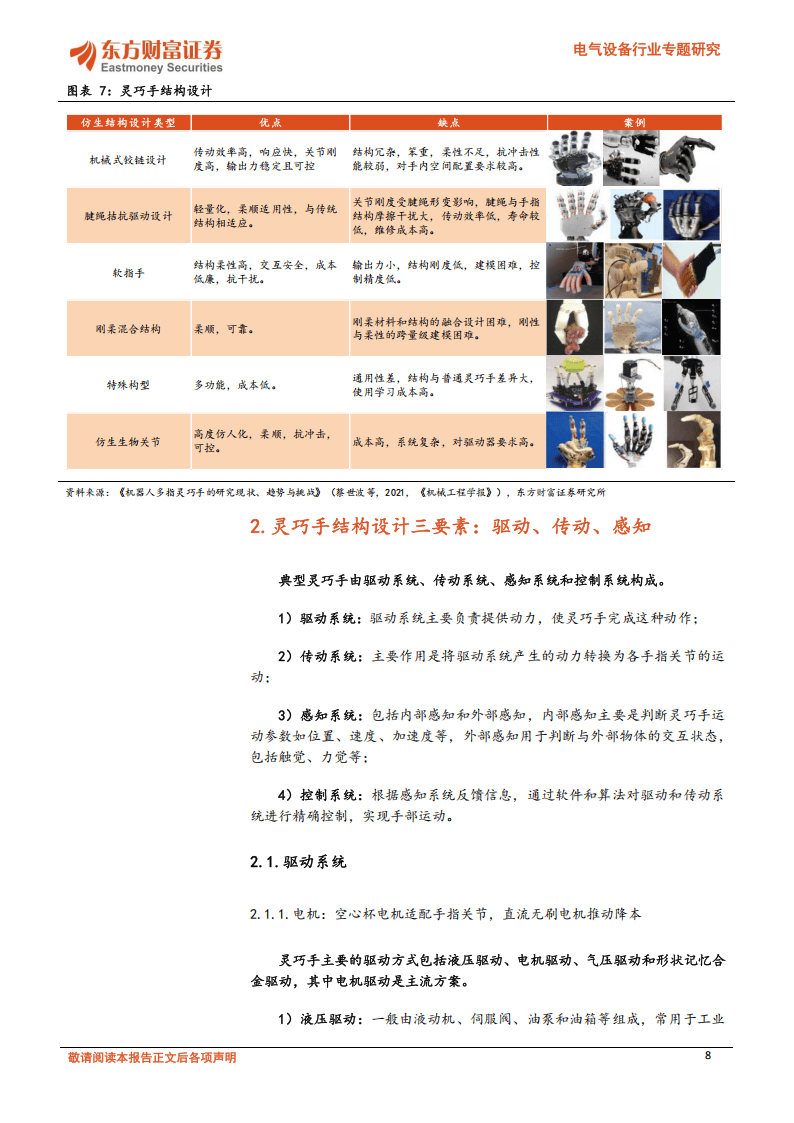
1. 灵巧手的关键作用与设计趋势:灵巧手是机器人与环境交互的末端执行器,对提升机器人性能至关重要。其设计模仿人手,自由度不断增加,部分产品已接近人手水平。但目前灵巧手在灵活精巧程度上仍有提升空间,结构设计多采用仿生机械结构。
2. 灵巧手的结构设计要素
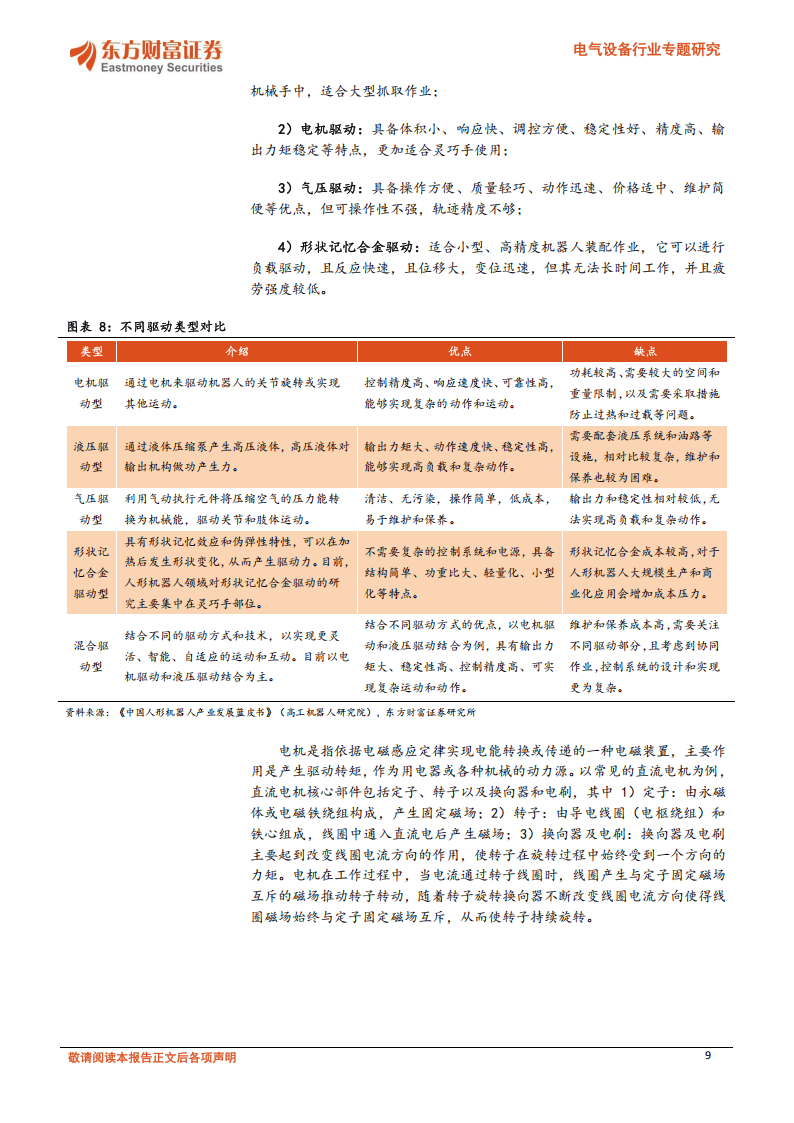
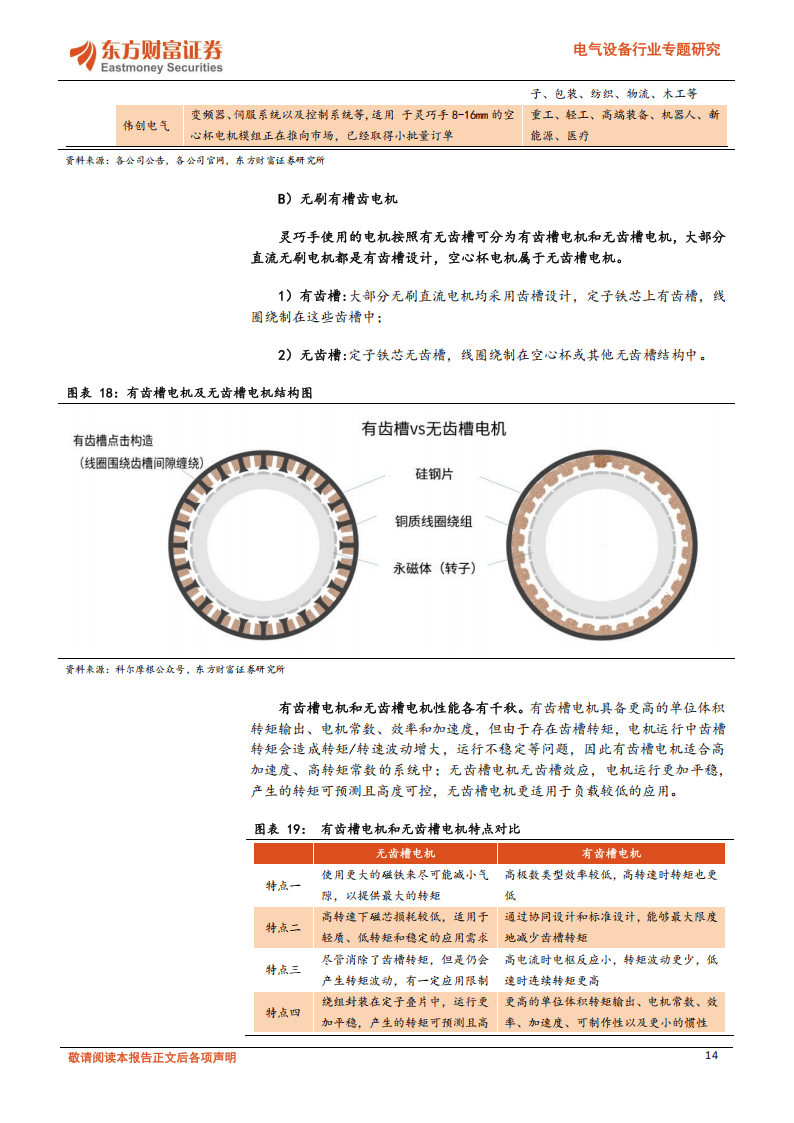
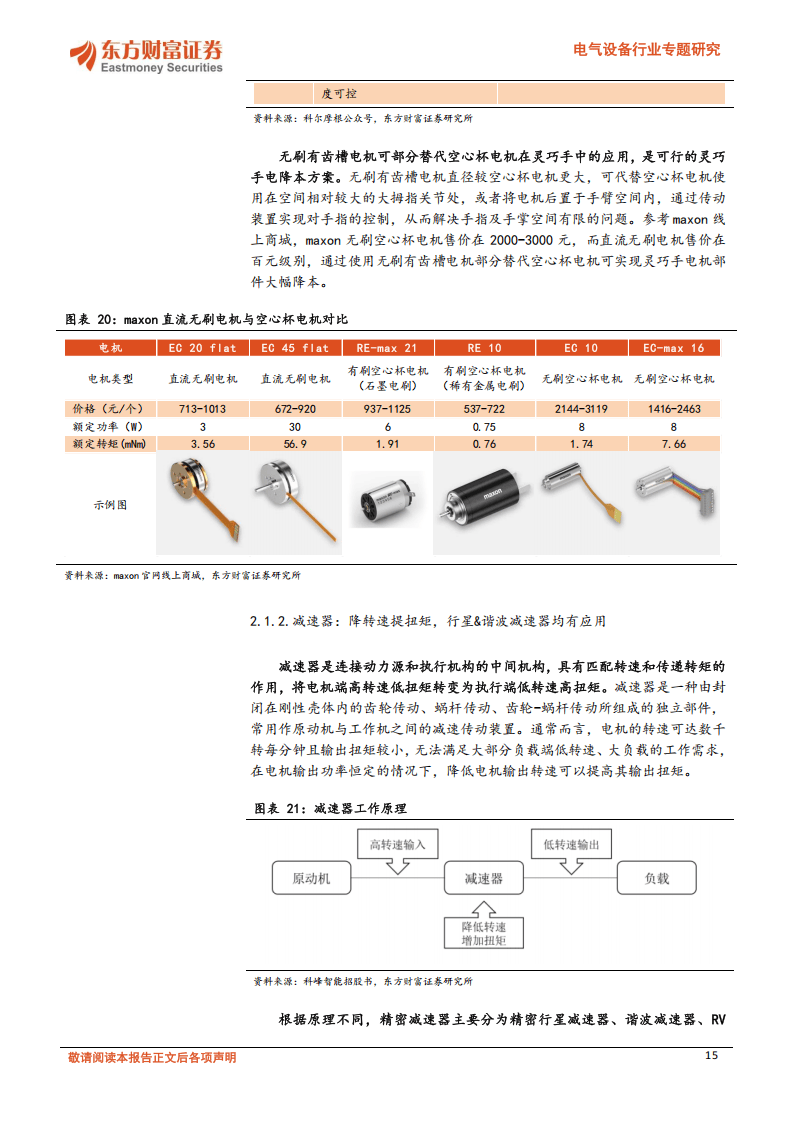
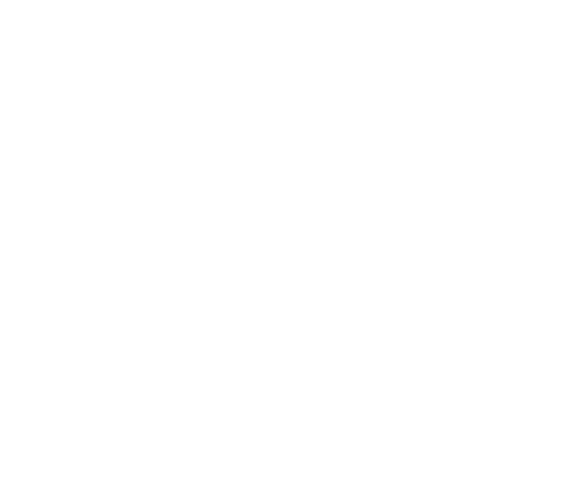
- 驱动系统:电机驱动是灵巧手的主流选择,空心杯电机因高效、高精度等优势适配手指关节,不过成本较高。无刷有齿槽电机成本低、转矩输出高,有望部分替代空心杯电机。减速器用于匹配转速和传递转矩,行星减速器和谐波减速器在灵巧手中均有应用。
- 传动系统:腱绳传动是当前主流,它排布灵活、柔性好,但负载能力有限,常用材料有钢丝绳和超高分子量聚乙烯纤维。微型丝杠传动具有高承载等优点,与腱绳复合传动能优势互补,成为未来发展方向。
- 感知系统:力/力矩传感器用于精准力控,多安装在手指和手腕处,应变片式应用广泛。触觉传感器赋予灵巧手触觉感知能力,正朝着阵列化、柔性化和集成化的电子皮肤方向发展。
3. Optimus灵巧手的迭代发展:Optimus一代灵巧手采用空心杯电机、齿轮箱和金属腱绳方案;二代外观更新,引入触觉传感器;三代变化显著,驱动系统外置,自由度提升,采用丝杠与腱绳复合传动,提高了传动效率和操控性能。
以下为报告节选内容