一种全闭环全直驱灵巧手传动技术问世
随着机器人技术的迅猛发展,️灵巧手作为机器人末端执行器的核心部件,其性能直接决定了机器人在复杂任务中的表现和适用范围。全球灵巧手行业呈现️百花齐放、百家争鸣的局面,各企业不断探索️不同的技术路线,以实现更高的自由度、更精确的控制以及更广泛的应用场景。
当前行业内对灵巧手自由度的定义存在️较大误区,有些灵巧手把具有20多个关节宣传成具有20+自由度,但他们这20多个关节不是每个关节都有一套单独的电机驱动,可能只有6电机驱动,这实际上是️6自由度,非20+自由度。真正的自由度应指每个关节都具备独立的驱动电机,自由度的数量应与驱动电机的数量相等,而非简单以关节数量衡量。
02环面包络蜗轮蜗杆直驱技术
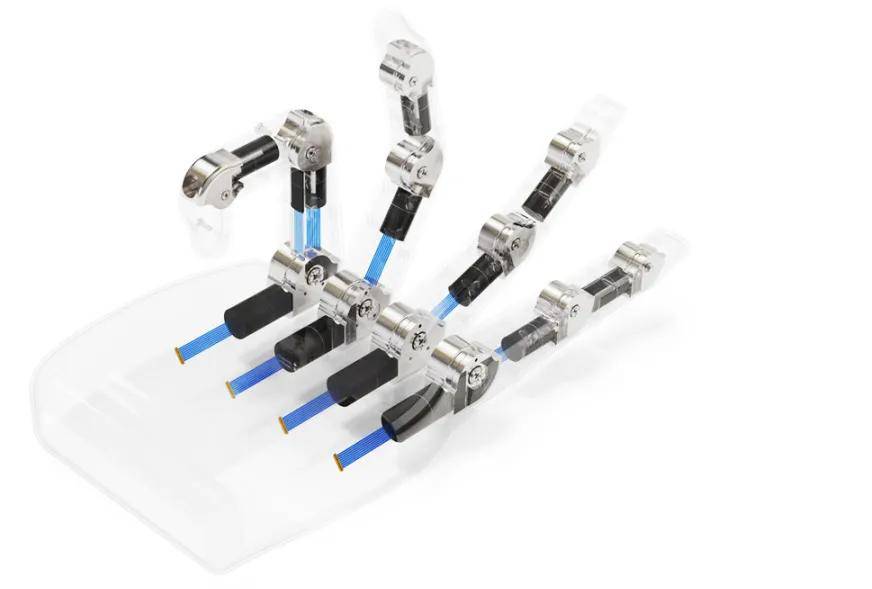
随着技术的发展,一种全新的驱动方式️环面包络蜗轮蜗杆直驱技术脱颖而出,采用环面包络多齿啮合原理,并且每个减速器高度集成了驱动器、无刷电机,编码器,真正实现️20+直驱自由度。
环面包络蜗轮蜗杆与普通蜗轮蜗杆对比
关于️环面包络蜗轮蜗杆技术发展介绍可以提供此链接查阅:
https://mp.weixin.qq.com/s/35P5Z-fVmfAu1aCiVj_ZaQ
03技术特点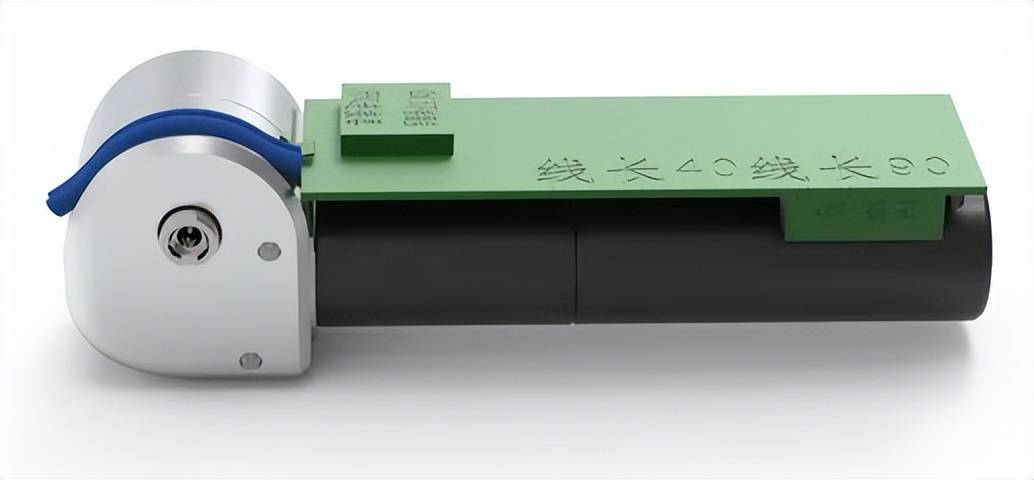
️更强刚性与稳定性:直驱结构减少中间传动环节,降低磨损和故障率。
️全闭环控制:实时反馈与精准控制,响应快速、精度高。
️高精度传动:环面包络蜗轮蜗杆传动可实现极高的传动精度,确保抓取动作的准确性。
️高度集成:每个关节模组高度集成,结构紧凑,便于维护。



独特的️90度输出,可以将驱动电机嵌入在手指里面,很好的适应手指的物理结构,体积非常小,重量非常轻,相较于行星滚珠丝杠驱动,环面包络传动技术在灵活性和自由度上取得突破性提升。相较于线绳驱动,环面包络传动技术在控制精度、握力控制稳定性和可靠性上表现显著更优。️综合性能突出,更适用于复杂、高精度任务。


微型化高扭矩设计,基于微型环面包络蜗轮蜗杆结构,减速机模组体积较传统方案️缩小40%,中心距覆盖️4.5mm-10mm全尺寸范围。配合️1300MPa抗拉强度的特种钢内齿,可稳定实现️25kg级握持力。在保持微型化优势(整机️重量仅9-49g)的同时,实现单关节️1-3N m扭矩输出,扭矩密度达到行业同类产品的2.3倍。其9g级超轻量化设计(相当于3枚硬币重量),为灵巧手关节模组️节省30%空间,大幅提升人形机器人末端执行器的拟人化程度。全工况可靠性保障 集成天然自锁功能与️IP65防护等级,即使在断电状态下仍能维持关节姿态稳定,经️200万次负载测试后精度衰减率小于0.5%,适用于-40℃至85℃极端环境。
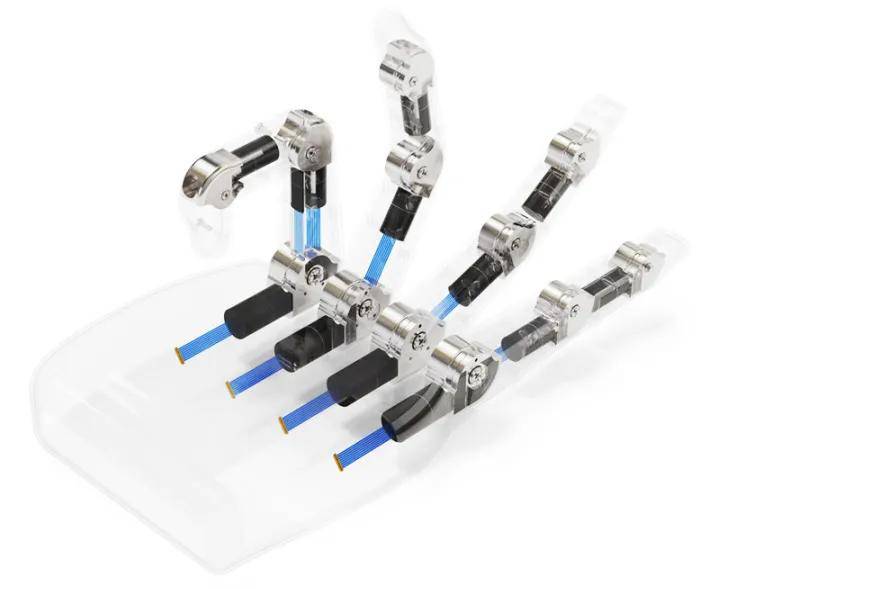

陶世原创的微型环面包络传动技术,是一种突破灵巧手传动边界的颠覆式创新,因为他可以将减速器安装在手指里面️直接驱动手指关节,这是目前全球唯一用减速器驱动手指关节的领先技术,一个灵巧手里面可以部署20多个这种减速器,灵巧手实现️20+自由度全直驱控制,每个关节模块️独立运作且️扭矩、精度极高。可轻松实现各类复杂动作,其️±0.015mm的运动精度,远超行业平均0.05mm水平。